Complément 1.1
Page 12 - Rectification sur la figure 1.1 - Référentiels newtoniens.
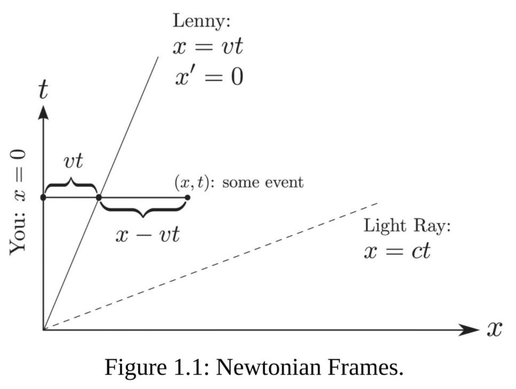
Ci-dessous, la figure 1.1 originale dans la version anglaise :
Dans la version française (première édition de 2018) il est indiqué sur l'axe de Lenny :
x = vt
x' = vt ce qui crée une confusion.
Comme cet axe représente la position de Lenny lorsqu'il est immobile dans son référentiel (x', t'), c'est une coquille.
Elle n'existe pas dans la version anglaise originale ci-dessus et on a donc :
x = vt
x' = 0
Lenny s'éloigne à la vitesse " v " de mon référentiel au repos, mais il est immobile dans son référentiel en mouvement comme il l'indique en bas de page 13 :
"dans la figure 1.1, je me décris moi-même par l'équation x' = 0 puisque je suis toujours (dans ce cas présent) à l'origine de mon système de coordonnées. " .
En fin de compte l'axe de Lenny représenté ici est son axe t' , analogue à mon axe axe t .